Im Takt bleiben – Datenerfassung und -übertragung bei der R-Serie V SSI (Teil 1)
Die R-Serie V ist unter anderem mit SSI-Ausgang erhältlich. Bei dem Sensor kann der Anwender zwischen einem asychronen und drei synchronen Modi zur Erfassung und Übertragung der Messdaten an die Steuerung wählen. Bevor die unterschiedlichen Modi erläutert werden, ist erst einmal zu klären:
Was ist SSI?
SSI ist die Abkürzung für Synchronous Serial Interface (dt.: synchronserielle Schnittstelle). Diese digitale Schnittstelle wurde 1985 von der Firma Max Stegmann GmbH (im Jahr 2002 übernahm die Sick AG die Max Stegmann GmbH) vorgestellt und ist bei der Übertragung von absoluten Messwerten im industriellen Umfeld sehr weit verbreitet. Dies liegt unter anderem an der Robustheit sowie dem recht einfachen Aufbau der Schnittstelle. So werden in einem Sensor wie der R-Serie V SSI für die Übertragung der Daten zur Steuerung ein
Schieberegister und ein Monoflop benötigt. Der Monoflop dient zur Ansteuerung des Schieberegisters. Wie der Name SSI sagt, werden mit dieser Schnittstelle Daten seriell, also nacheinander Bit für Bit, übertragen. Die Datenübertragung kann dabei auch synchron zu einem von der Steuerung vorgegebenen Takt geschehen.
Wie funktioniert SSI?
Die Daten werden bei SSI seriell übertragen, wobei die Steuerung den Zeitpunkt der Abfrage bestimmt. Bei der Datenübertragung wird der im Folgenden beschriebene Ablauf durchgeführt (Abb. 1):
- Im Ruhezustand, wenn keine Daten übertragen werden, befinden sich die Datenleitung und die Taktleitung auf dem High-Pegel. (1)
- Mit der ersten fallenden Taktflanke wird das aktuelle Positionsdatum im Schieberegister eingefroren. Eine Aktualisierung des Positionsdatums ist in diesem Takt nicht mehr möglich. (2)
- Bei der folgenden steigenden Flanke wird das Bit angelegt. (3)
- Mit der anschließenden fallenden Flanke beginnt die Übertragung des Datums mit dem Most Significant Bit (MSB, dt.: höchstwertiges Bit). (4)
- Dies wiederholt sich für jedes nächst niedrigere Bit bis das Last Significant Bit (LSB, dt.: niedrigstwertiges Bit) übermittelt ist.
- Nach der letzten fallenden Taktflanke beginnt die Monoflopzeit (5). Nach der Übertragung des LSB verbleiben bis zum Ende der Monoflopzeit die Datenleitung auf dem Low-Pegel und die Taktleitung auf dem High-Pegel. Danach ist der Sensor bereit für die Übertragung eines neuen Datums. (6)
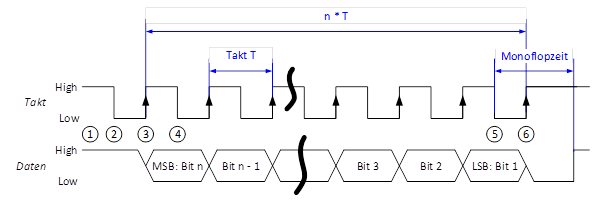
Abb. 1: Impulsdiagramm einer SSI-Datenübertragung bei einer Datenlänge von n Bit
Bei der R-Serie V SSI kann neben der Position auch die aktuelle Temperatur innerhalb des Sensorelektronikgehäuses übermittelt werden. Entsprechend des Übertragungsdiagramms in Abb. 2 werden diese Daten aufgrund der seriellen Übertragungsart nacheinander übertragen. Hierbei werden zuerst 8 Bit für das Temperaturdatum und anschließend 24 Bit für das Positionsdatum übermittelt, so dass die Datenlänge insgesamt 32 Bit beträgt. Werden neben dem Positionsdatum ein Alarmbit und ein Paritätsbit übermittelt, werden diese beiden Bits nach dem Transfer der 24 Bit für das Positionsdatum übertragen.
-und-paritätsbit-(p-bit).png?Status=Master&sfvrsn=174c64bf_1)
Abb. 2: Aufbau des SSI-Übertragungstelegramms bei der R-Serie V SSI
bei unterschiedlicher Datenlänge mit Alarmbit (A-Bit) und Paritätsbit (P-Bit)
Asynchrone Datenübertragung bei der R-Serie V SSI
Im asynchronen Modus werden die Positionsdaten innerhalb der R-Serie V SSI so schnell aktualisiert, wie der Messzyklus des Sensors es erlaubt, unabhängig von der Steuerung. Die Steuerung bestimmt lediglich, wann das aktuell bereit gestellte Datum über die SSI-Schnittstelle abgerufen wird. Wie in Abb. 3 dargestellt, führt der Sensor häufiger Messungen durch als die Steuerung abfragt. Bei dem asynchronen Modus ist die zeitliche Verzögerung zwischen Start der Messung und Übertragung des Positionswerts, auch als Totzeit bezeichnet, unterschiedlich lang.

Abb. 3: Schematische Darstellung des asynchronen Modus bei der R-Serie V SSI
Synchrone Datenübertragung bei der R-Serie V SSI
Im synchronen Modus passt der Sensor die Durchführung der Messung sowie die Übertragung des Positionswerts an den Abfragetakt der Steuerung an. Das bedeutet, dass sich der Sensor auf den Takt der Steuerung synchronisiert und ermittelt, wann die Messwerte von der Steuerung angefordert werden. Bei der R-Serie V SSI stehen drei Varianten der synchronen Datenerfassung und -übertragung zur Verfügung:
- Synchroner Modus 1
- Synchroner Modus 2
- Synchroner Modus 3
Was ist der synchrone Modus 1 bei der R-Serie V SSI?
Im synchronen Modus 1 passt sich der Sensor an den Takt der Steuerung an und startet seine Messung so, dass sie kurz vor der nächsten Abfrage der Steuerung abgeschlossen ist. Es wird der jeweils aktuelle Messwert übertragen (Abb. 4).

Abb. 4: Schematische Darstellung des synchronen Modus 1 bei der R-Serie V SSI
Wie in Abb. 4 zu erkennen, ist die zeitliche Verzögerung zwischen Start der Messung und Übertragung des Positionswerts konstant. Bei einer asynchronen Messung schwankt die Totzeit in einem großen Bereich. Eine konstante Totzeit ermöglicht eine exakte Zuordnung der Messung zu einem Zeitpunkt und ist eine wesentliche Voraussetzung für Motion-Control-Anwendungen. Die Totzeit wird beim synchronen Modus minimiert (Abb. 5).
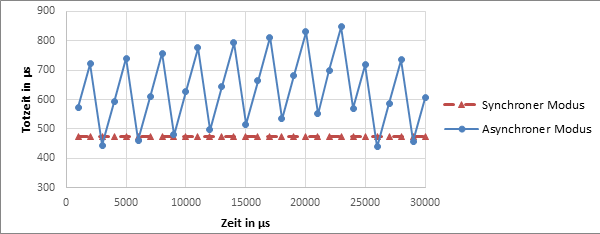
Abb. 5: Verlauf der Totzeit im asynchronen Modus und im synchronen Modus
Was ist der Parameter „Jitter Window“? Es kann passieren, dass der vorgegebene Takt der Steuerung schwankt. Diese Ungenauigkeit des Takts wird als zeitlicher Jitter bezeichnet. Wenn dies auftritt, kann sich der Sensor im synchronen Modus nicht auf den Takt der Steuerung synchronisieren und zeigt den Fehler „Sync Status Error“ über die LEDs an. Eine Abhilfe kann die Anpassung des Parameters Jitter Window sein. Dieser Parameter kann bei der R-Serie V SSI über den TempoLink Sensorassistenten eingestellt werden. Das Jitter Window ist die Zeit zwischen dem Ende der Messung und der nächsten Abfrage durch die Steuerung. Diese Zeit wird in μs angegeben. Das Jitter Window ist in Abb. 4 für einen Abfragetakt eingezeichnet. Je größer das Jitter Window ist, desto eher startet der Sensor die nächste Positionsmessung, um rechtzeitig vor dem nächsten Takt den aktuellen Positionswert bereitstellen zu können. Sollte die Abfrage durch die Steuerung aufgrund eines ungenauen Takts eher eintreffen als erwartet, ist die Positionsmessung bei einem ausreichend großen Jitter Window bereits abgeschlossen. Allerdings wird durch eine Vergrößerung dieses Parameters die Zykluszeit des Sensors verlängert. Daher ist der Wert des Jitter Windows mit Bedacht zu wählen, um ein passendes Verhältnis zwischen dem zeitlichen Jitter des Takts und der Zykluszeit des Sensors zu wählen.
KONTAKTIEREN SIE UNS
Sie haben eine Frage zu einem unserer Produkte oder möchten mehr Details über eine mögliche Anwendung erfahren?
Klicken Sie hier, um unser Anfrageformular auszufüllen
Sie möchten die neuesten Blog-Updates und andere Neuigkeiten nicht verpassen?
Klicken Sie hier, um unseren Newsletter zu abonnieren
Maximale Kundenzufriedenheit